













Telemetrie für das kleine Portemonnaie (von Fabian)
Es ist mit Sicherheit nichts bahnbrechend Neues und auch keine Raketenwissenschaft… trotzdem möchte ich kurz berichten: OpenXSensor - Ein Open Source Telemetrie Eigenbau Projekt für Multiplex, FRSKY, Graupner/Hott und Jeti.
Ich rüste mittlerweile alle meine Modelle (auch die kleinen) mit einer passenden Telemetrie aus, die ich gerne auf das Modell anpasse:
… in Segler kommt ein Vario, wenn möglich auch gleich mit Energiekompensation
… bei Elektroantrieben interessieren mich die verbrauchte Kapazität und die Akkuspannung
… bei Verbrennern mit nicht sichtbaren Tanks ist der Tankfüllstand wichtig
… ein GPS ist eher eine Spielerei aber mich interessieren die zurückgelegte Distanz und die Geschwindigkeit. Im Falle eines Modellverlusts kann allerdings die letzte Position sehr hilfreich bei der Suche sein.
Je nachdem, welches Fernsteuersystem man verwendet, sind die Modulpreise für die Originalsensoren recht hoch und meine Preisbereitschaft stößt da an gewisse Grenzen. Ich weiß nicht wie es Euch geht, aber ich finde 120€ für ein GPS oder 90€ für ein Vario einfach viel.
Besonders für die kleineren Modelle gehe ich seit 2 Jahren einen anderen Weg und baue die Sensoren stumpf selbst.
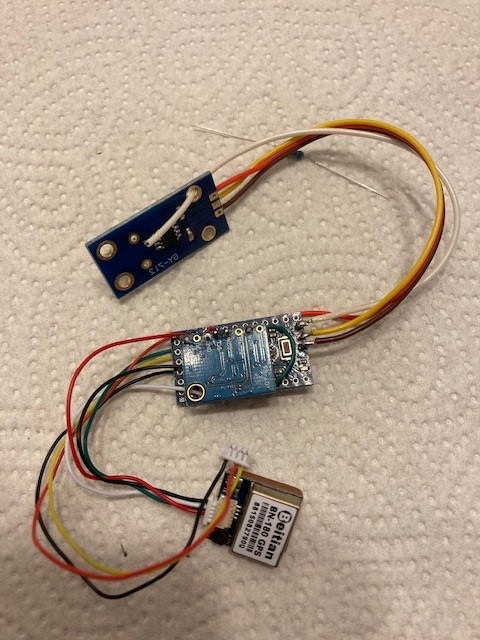
Kurzes Beispiel: E-Segler Thermikhobel soll mit mit GPS, Vario, Stromsensor und Akkuspannung ausgerüstet werden.
Die notwendigen Komponenten sind dazu schnell zusammengestellt (zusammen ca. 20€ beim freundlichen chinesischen Händler oder ein bisschen mehr bei einem deutschen Händler)
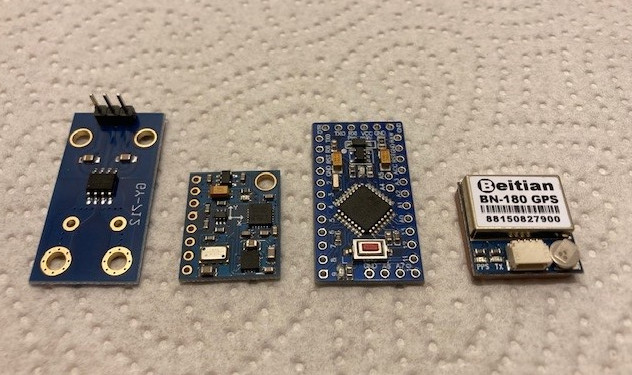
- Links befindet sich ein Stromsensor, der den Strom zwischen Akku und Regler misst. Hier ist es ein kleines Modul mit 30A Maximalstrom abgebildet. Das gibt es natürlich auch für deutlich größere Ströme (z.B. 150A).
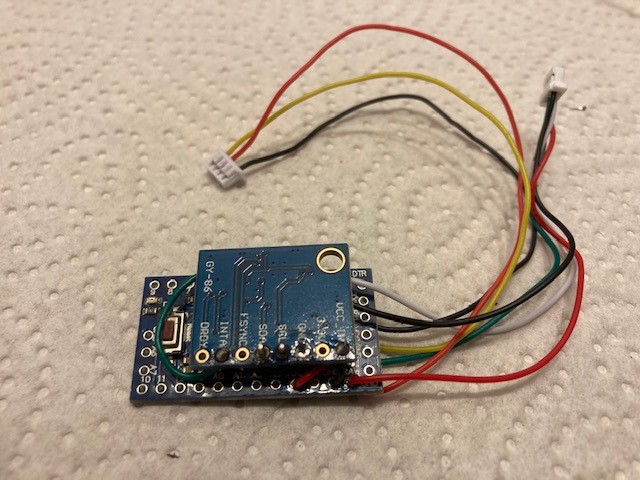
- Dann kommt das Vario Modul. Auf der kleinen Platine sitzen neben dem barometrischen Sensor (unten links) zusätzlich drei Beschleunigungssensoren. Diese sorgen für eine deutlich schnellere Reaktion bei gleichzeitig sehr niedriger Streuung. Viele Standard GPS Module nutzen keine Beschleunigungssensoren, im direkten Vergleich sind sie meiner Erfahrung nach deutlich langsamer, weil sie das Rauschen des barometrischen Sensors über die Zeit stärker dämpfen müssen
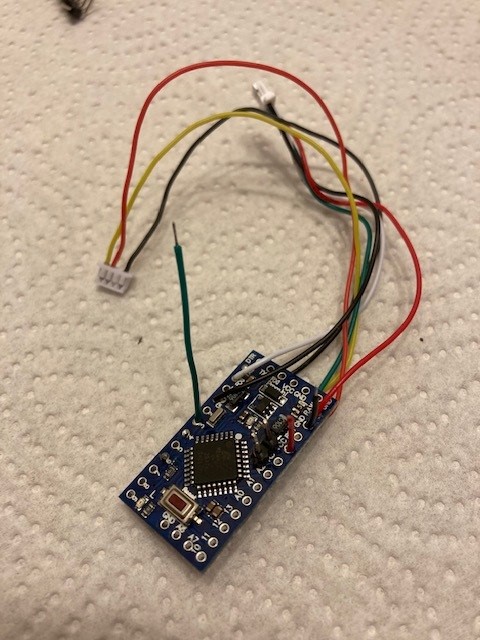
- Dann kommt das Herz, ein kleiner Arduino Baustein mit I2C Bus, digitalen Eingängen und Ausgängen.
- Als letztes kommt das GPS Modul
Nach langem Suchen habe ich mir ein allgemeines Schaltbild zurechtgelegt, auf dem alle möglichen Module angetragen sind und welches ich mir beim Aufbau als Bauplan daneben lege.
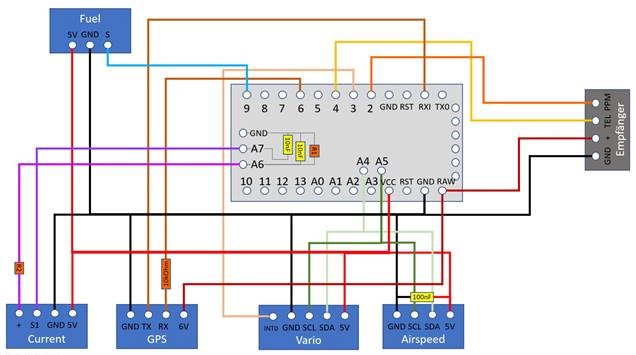
Als erstes kommt der technische Aufbau mittels Lötkolben und dem ersten Kaltgetränk (Zeitbedarf ca. 1,5h):
Zunächst wird das Anschlusskabel für den Telemetrie Eingang des Empfängers verlötet. Dann kommt das GPS Anschlusskabel mit einem kleinen Widerstand.
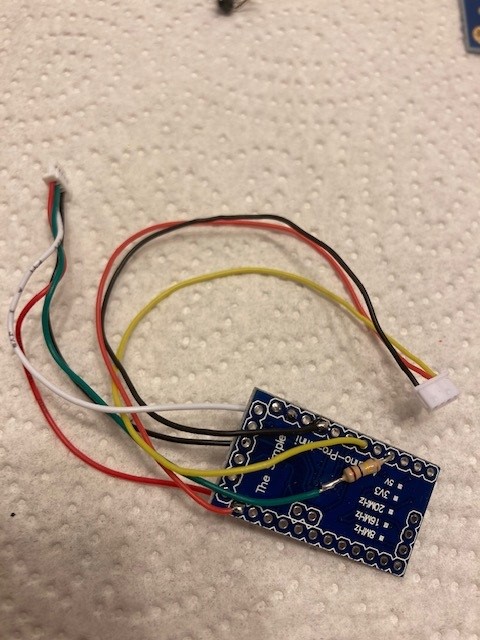
Dann kommen 3 Anschlusskabel für das Vario sowie zwei Pins auf dem I2C Bus für den Vario Sensor.
Das GPS wird kopfüber direkt auf die Pins gelötet und an den 3 weiteren Kabeln angeschlossen.
Für die Spannungsmessung wird ein Spannungsteiler aufgebaut (nicht mehr als zwei Widerstände) und der Eingang wie auch der Eingang des Stromsensors über 2 Kondensatoren gedämpft.
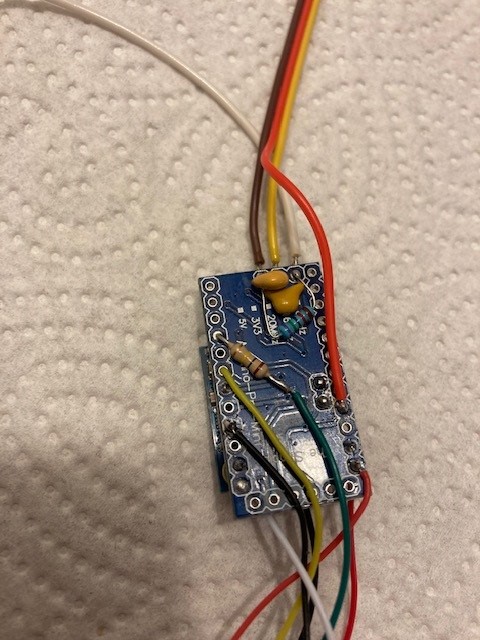
Nach dem Anschluss des Stromsensors ist der Aufbau auch schon fertig und das erste Kaltgetränk leer.
Als nächstes wird auf den Logikbaustein die notwendige Software aufgespielt. Dazu verwendet man einen kleinen USB-Programmer (FT232RL USB zu TTL Serial Adapter), den man schlicht an die Logikbaustein hält.
Die Software muss allerdings konfiguriert werden, in dem man bestimmte Werte mitgibt:
- Welche Sensoren sind angeschlossen (z.B. GPS Ja oder nein)
- Wie sind die Spannungsteiler aufgebaut (Widerstandswerte) und an welchem Eingang sind sie angeschlossen
- Kalibrierung für Beschleunigungssensoren etc.
- Welches Telemetrie-Protokoll soll verwendet werden
Hierzu wird die Arduino Entwicklungsumgebung genutzt und der zuvor heruntergeladene OpenXSensor Code auf den Logikbaustein übertragen.
Ja, die Konfiguration findet direkt im Quellcode statt, aber, man muss dazu nicht programmieren können! Die Werte werden lediglich über Konstanten an definierten Stellen festgelegt. Zu allem liegt eine tolle Dokumentation vor, so dass man sich relativ schnell zurecht findet.

Dieser zweite Schritt geht mit dem 2. Getränk einher und nimmt noch mal eine halbe Stunde ein.
Hat man korrekt gelötet und die Einstellungen richtig vorgenommen (mit ein bisschen Konzentration klappt das in der Regel auf Anhieb) ist der Sensor fertig zum Test, den Schrumpfschlauch und den Einbau.
Das wars eigentlich schon. Auf dem Tisch liegt ein 25g leichter Sensor passend zum Einsatzbereich, der bei Anschaffung von Original-Einzelsensoren ein Vielfaches gekostet hätte. Bislang habe ich ca. 10 dieser Sensoren für meine Modelle gebaut, alle funktionieren zuverlässig und problemlos.
Viel Erfolg beim Nachbauen,
Euer Fabian